

Hace poco más de una década, los ingenieros se dieron cuenta de que el uso rápido y creciente de la electrónica en los automóviles requeriría eventualmente una idea radicalmente diferente respecto al cableado. A medida que el contenido electrónico en los vehículos continuó aumentando, también lo hizo el bulto, el peso, el costo y la complejidad de los sistemas de alambrado. En el año 1980, el auto medio tenía cerca de 500 circuitos separados en su arnés de cables.
Durante los siguientes 10 años, la introducción de la inyección electrónica de combustible, las transmisiones electrónicas, los bolsas de aire, los frenos antibloqueantes, los controles de la tracción, los controles automáticos del clima, la dirección y las suspensiones electrónicas y más accesorios de poder agregaron aún más alambres. Para 1992, el auto de lujo medio tenía un arnés grueso de cables con más de 2.000 alambres – un aumento cuádruple en poco más de una década.
Estaba claro que tenía que hacerse algo para acortar el aumento de los arneses del cableado. ¿Pero qué?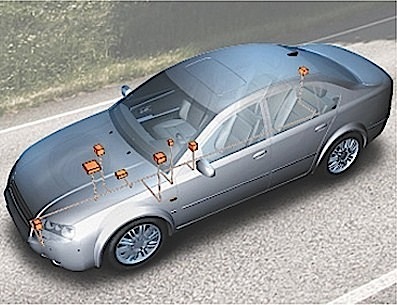
Algunos circuitos fácilmente se pueden compartir para reducir el número de los alambres necesitados. Los circuitos de tierra y los circuitos de la fuente de alimentación pueden ser compartidos a menudo, aunque los componentes individuales necesitan tener fusibles para proteger el resto del cableado contra sobrecargas.
Una luz del domo, por ejemplo, necesita una fuente de alimentación y la tierra para funcionar. Pero también necesita un interruptor de la puerta para apagarla y prenderla. Y algunas bombillas como las direccionales, luces del freno, luces de reversa y luces de advertencia tienen que estar en circuitos separados porque funcionan independientemente el uno del otro. ¿Así que cómo pueden los dispositivos múltiples compartir el mismo circuito?
La respuesta está en multiplexar. La idea básica de la multiplexación es utilizar el mismo alambre para compartir señales de comando, señales de retroalimentación y de datos entre los dispositivos. La corriente y la tierra todavía se proporcionan por separado, pero se combinan los circuitos de “conmutación”. Esto elimina la necesidad de muchos alambres separados y permite que los arneses del cableado sean más pequeños, más livianos y más baratos. Veamos cómo la multiplexación trabaja.
En un circuito con cableado múltiplex, cada dispositivo tiene su propia conexión de tierra y su fuente de alimentación. La corriente fluye por un alambre y el cuerpo del vehículo sirve como la conexión a tierra universal. Los comandos de encendido-apagado y otros datos necesitados para operar los diversos dispositivos todos son llevados por un segundo cable llamado el alambre del “ómnibus de datos” (data bus). Probablemente lo llaman un autobús porque lleva a múltiples pasajeros.
Para hacer todo el trabajo, es necesaria cierta electrónica adicional para generar las señales y los datos del comando, para manejar el tráfico a lo largo de la ruta del ómnibus de datos, y para filtrar los mensajes que se reciben en cada punto a lo largo del camino (llamados “nodos”). Esto requiere un módulo o un chip especial en cada nodo para manejar las comunicaciones.
El enviar todos los comandos de operación y de datos compartidos a lo largo de un solo alambre elimina así la necesidad de conectar con alambres cada dispositivo individual. Esto reduce el número de los circuitos individuales necesitados para operar el vehículo y permite que cualquier dispositivo conectado con el ómnibus de datos pueda comunicarse directamente con cualquier otro dispositivo en el autobús. Esto permite que los ingenieros hagan los autos mucho más inteligentes teniendo varios módulos interactivos en tal forma que antes era imposible.
Compartir los circuitos
La multiplexación fue desarrollada inicialmente por la compañía de teléfonos con el fin de reducir el número de alambres necesitados para llevar a cabo conversaciones de teléfono separadas. De regreso al pasado cuando la mayoría de los hogares rurales compartían una “línea personal común” (que tiene un significado enteramente diferente hoy en día), una forma primitiva de multiplexación fue utilizada para compartir la línea. Cada cliente en la línea tenía un timbre diferente para las llamadas entrantes. La única desventaja con este sistema era que cualquiera en la línea podría tomar y escuchar la conversación.
Es el mismo principio con la multiplexación automotriz. Las llamadas salientes son las señales de comando, señales de retroalimentación y datos de operación generados por los varios módulos y dispositivos en el ómnibus de datos. Los receptores son cualquier otro módulo o dispositivo que se le haya autorizado el acceso a la información.
La clave de la multiplexación es mantener todos los mensajes separados, y filtrar solamente esos mensajes que necesiten ser escuchados por todos los que llaman en la línea personal.
Como en la vida real, algunos mensajes son más importantes que otros y se les da prioridad. Esto se hace cuando se codifica el mensaje. El estado de prioridad le da al mensaje el “derecho de paso,” así que para hablar, en el ómnibus de datos, significa que otros mensajes tienen que esperar hasta que los más importantes terminen su ronda.
Protocolos
De vuelta atrás a los finales de 1980 cuando el multiplexar era seriamente considerado para futuros usos automotrices, un número de diversos estándares o protocolos fueron considerados. Cada protocolo definió cómo los mensajes multiplexados serían codificados (número de bits, los niveles de voltaje, longitud de cada byte, etc.). Éstos incluyeron el protocolo “CAN”, co-desarrollado por Bosch e Intel; propietarios de protocolos, por Mazda, Mitsubishi, Hitachi y Volkswagen; el protocolo europeo estándar ISO 9141; y el de SAE J1850, el cual combinó protocolos separados desarrollados por Chrysler (C2D), Ford (HBCC) y General Motors (DLCS).
El que emergió eventualmente como el estándar para los vehículos en los E.E.U.U. hoy en día es el SAE J1850, que permite actualmente dos diferentes métodos de multiplexación: una señal de anchura de pulso modulada con una velocidad de 41.6 kilobytes por segundo, y una anchura de pulso modulada variable (VPWM) con una velocidad de 10.4 kbs.
Con ambos acercamientos, todas las comunicaciones en el ómnibus de datos consisten en mensajes o paquetes individuales de información en lugar de una corriente continua de información. Cada mensaje se cifra en código binario con “1” y “0” que representan números de código o palabras. Al “1” y al “0” se les llama “bits” que se agregan para hacer “bytes.” Piense en los bytes como palabras en lenguaje de programación.
¿Me están siguiendo? Bien, porque se va a poner peor. Cada mensaje es como un pequeño tren de carga que lleva pedacitos de información separados en una cadena de autos. Cada auto representa una parte diferente del mensaje. El mensaje entero se llama un “marco” (frame). En el frente está un byte inicial seguido por bytes adicionales que identifican el tipo de mensaje (módulo de control de la carrocería, PCM, HVAC, ABS, etc.). Después vienen los bytes de datos que contienen la información enviada. Después de esto viene un byte de “control de redundancia cíclico” para verificar la integridad del mensaje, seguido por un byte de fin del mensaje.
¿Le agarro a la figura del tren? Bien, como los trenes verdaderos que comparten la misma vía, necesitan tener un policía de tráfico para evitar que todos los mensajes en el ómnibus de datos choquen el uno con el otro y causen un accidente. Eso se hace con un reloj que divida el tiempo disponible en el autobús en pequeños segmentos. A cada mensaje después se le asigna un determinado de tiempo y se le envía a su destino. Cada transmisión toma solamente algunos microsegundos, así que mucha información puede ser enviada y recibida a lo largo del ómnibus de datos en un periodo corto de tiempo. La velocidad de la transmisión se conoce como “baud rate,” y entre más alta sea esta velocidad más rápidamente el sistema se puede comunicar y procesar la información.
Cuando un mensaje sale de un ómnibus de datos múltiplex, pasa por cada módulo unido al autobús – pero es recibido solamente por el módulo específico para el cual es dirigido. Los otros módulos no hacen caso del mensaje y esperan por los mensajes que son dirigidos para ellos. Algunos módulos se programan para escuchar todo el tiempo, mientras que otros muestrean solamente el tráfico de vez en cuando. Todo depende de lo que hace el dispositivo y de cuánta señal de entrada necesita para hacer su trabajo.
Una de las ventajas de la multiplexación (además de reducir el número de cables en los circuitos necesitados en un arnés de cables) es que el dispositivo de recepción puede también comunicarse de nuevo al módulo y dejarle saber que el mensaje fue recibido (no como los correos electrónicos que se envían y que terminan a menudo para arribar en ninguna parte). Eso permite que el sistema se auto-diagnostique.
Si la PCM envía un comando a un módulo específico vía el ómnibus de datos pero no tiene ninguna respuesta posterior, la PCM puede reconocer la falla y fijar un código de diagnóstico de falla. General Motors, por ejemplo, tiene varios códigos para OBD II para los problemas de comunicación de datos en serie entre ciertos módulos. Un código P1573 indica un problema del circuito de datos en serie entre la PCM y el EBTCM. Otros códigos de falla de datos en serie de GM incluyen P1603, P1604, P1605, P1610 y P1611.
Usos
El primer vehículo doméstico construido para utilizar multiplexación fue el Cadillac 1990 Allante. La multiplexación fue utilizada solamente para el sistema de iluminación del vehículo, que Cadillac llamó el sistema de la “iluminación distribuida” (más adelante se calificó como el sistema de iluminación “disturbado” por los técnicos frustrados que tuvieron que arreglarlo). Los componentes principales incluyeron el módulo de control de la carrocería (BCM), un conjunto del “interruptor izquierdo pod” (LSP) con interruptores de botón, nueve “módulos interruptores de salida” (OSMs) numerados del dos al 10 para cada lámpara individual, y el ómnibus de datos en serie para las comunicaciones.
En este vehículo, la BCM controla el ómnibus de datos y recibe señales de entrada del conductor vía el conjunto del LSP. Si el conductor presiona el botón para encender las luces, la BCM procesa la petición y envía comandos de salida a cada faro delantero y luz trasera OSM.
Para hacer el sistema tan seguro como fuera posible, la BCM monitorea continuamente el LSP y los OSMs para cerciorarse de todos estén en línea y funcionen correctamente. El ómnibus de datos también se diseña como un ciclo completo de modo que cada módulo en el circuito pueda recibir comunicaciones de cualquier extremo si una interrupción ocurre en el cableado.
Si la BCM detecta una falla, fija un código de diagnóstico de falla e informa al conductor con un mensaje de “falla en la iluminación” en el Centro de Información de Manejo del Control del Clima. El sistema tiene un modo de auto-diagnóstico el que puede ser accesado manualmente girando la ignición y presionando y sosteniendo los botones de Off y Warm simultáneamente en el panel de control. Cualquier código con un prefijo “L” indica un problema en el circuito múltiplex de iluminación. Presionando “RESET” se sale del programa de auto-diagnóstico.
En este sistema, el BCM también hace algunas funciones inteligentes cuando un bombillo falla. Si un faro de la luz baja se funde, enciende la lámpara de la niebla en el mismo lado para compensar. Si una señal direccional delantera falla, la BCM utiliza la luz de estacionamiento para destellar las intenciones del conductor. Si un OSM falla y tiene que ser substituido, un solo módulo se puede utilizar en cualquier localización.
Cuando General Motors rediseño el Corvette en 1997, también volvió a trabajar en el arnés del cableado para incluir la multiplexación. Esto redujo el tamaño y la complejidad del arnés del cableado en un 20%, permitiendo que el auto tenga más características y comunicaciones “inteligentes” entre el motor, la transmisión, el sistema de control de manejo, el ABS y el sistema de control de la estabilidad. Pasa lo mismo con muchos autos de lujo y sedanes deportivos hoy en día.
En años recientes, la mayoría de los fabricantes de vehículos están utilizando el multiplexado donde tiene sentido. Es demasiado costoso para los usos donde el trazado de circuitos convencionales puede ser fácilmente alambrado. Pero para compartir la información entre los módulos de control, Multiplexar se ha convertido en una necesidad.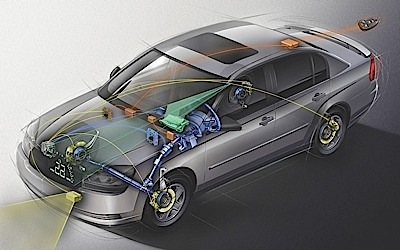
En el Volvo S80, incluso los espejos retrovisores del exterior se multiplexan para recibir comandos de los botones en la puerta del conductor. En los 2001 y más nuevos minivans de Chrysler con aire/acondicionado trasero, los módulos multiplexados controlan la circulación del flujo de aire y mezclan las puertas frontales y las posteriores.
Diagnóstico
Tan buena como es la multiplexación, también puede causar toda clase de problemas extraños cuando las comunicaciones se interrumpen. Si el sistema detecta una pérdida de comunicación con un módulo, fijará generalmente un código de falla para ayudarle a identificar y a aislar la falla. Pero los problemas intermitentes pueden o no pueden fijar un código dependiendo de su severidad y duración.
Una situación peor es cuando las comunicaciones se distorsionan debido a ruido indeseado en el ómnibus de datos o porque un módulo está generando una mala señal. Esto puede hacer que otros módulos ignoren o lean mal sus instrucciones con resultados imprevisibles. El vehículo puede no operar, o puede funcionar muy bien entonces se apaga sin ninguna razón aparente, las luces puede prenderse o apagarse, los accesorios puede funcionar intermitentemente o no funcionar, etc. Esta clase de problemas no fijan un código de falla y actúan a menudo como si fueran fantasmas que se ocultan en el sistema eléctrico.
El ruido exterior algunas veces se puede generar por los cables de las bujías mal distribuidos que corren muy cerca del arnés de cables. Un alternador defectuoso puede incluso causar bastante variación en el voltaje de salida y trastornar la operación del sistema completo.
Algunos sistemas múltiplex, tales como el sistema C2D de Chrysler, utilizan un “twisted pair” (par torcido) de alambres para la supresión del ruido. Otros, como GM, utilizan apenas un solo alambre. En cualquier caso, los conectores flojos o corroídos, tierras débiles, cortocircuitos e interrupciones degradar o destruyen la integridad del circuito del ómnibus de datos. Incluso el bajo voltaje de la batería puede causar problemas.
La clave para diagnosticar problemas eléctricos con múltiplex, por lo tanto, está en:
- entender el sistema en el que usted está trabajando;
- comprobar para ver si hay algunos datos sobre el ómnibus de datos;
- medir el voltaje del ómnibus de datos para ver si está dentro de lo especificado; y
- si no está, aislar la falla desenchufando o intercambiando los módulos uno por uno hasta que se elimine la falla.
Si usted conecta un osciloscopio a un cable del ómnibus de datos y se exhibe la señal, usted verá un patrón cuadrado digital de la onda que cambia en anchura o frecuencia del pulso. El patrón de la onda confirma allí que hay datos sobre el autobús, pero los datos no tienen sentido porque están en código binario que usted no puede entender. Es lo mismo como mirar datos en serie en un conector de trasmisión de datos (DCL). Es todo indescifrable a menos que usted tenga una herramienta de la exploración que pueda traducir los datos a una información legible.
Si no hay datos sobre el autobús (un trazador de líneas plano), no hay comunicaciones y el módulo que genera la señal de salida (generalmente la BCM o la PCM) está probablemente muerta.
Una buena señal del ómnibus de datos debe ser una forma de onda cuadrada con las esquinas agudas aceptables, con la parte alta y baja planas, y los lados verticales. Los picos, las esquinas redondeadas, los puntos y las líneas que se inclinan son todas estas indicaciones de la falla porque distorsionan la forma de onda y la hacen difícil de leer. La causa subyacente puede ser ruido externo o interno, malas conexiones, resistencia excesiva, problemas del voltaje, etc.
Una cosa que usted puede hacer es medir la altura de la forma de onda para considerar si está dentro de la gama especificada de voltaje (típicamente 2.5 voltios o 7.75 voltios dependiendo del uso). La misma revisión se puede también simplemente con un DVOM.
Por ejemplo, digamos que usted está mirando un ómnibus de datos de múltiplex de la detección de colisión de Chrysler. Este sistema funciona normalmente con 2.5 voltios, ± 0.1 voltios. Si el voltaje del ómnibus de datos está fuera de rango, hay un problema. El módulo de control de la carrocería genera el voltaje de polarización en este sistema, así que una forma para detectar un módulo malo es desenchufar los otros módulos uno por uno hasta que usted encuentra el que trae el voltaje de regreso a lo normal. Haga esto con la llave apagada, después vuelva a inspeccionar el voltaje del autobús cada vez después de dar vuelta a la llave del encendido. No desenchufe ningún módulo mientras que el voltaje está encendido pues el hacerlo podría crear una elevación de voltaje que pueda causar daño adicional.











